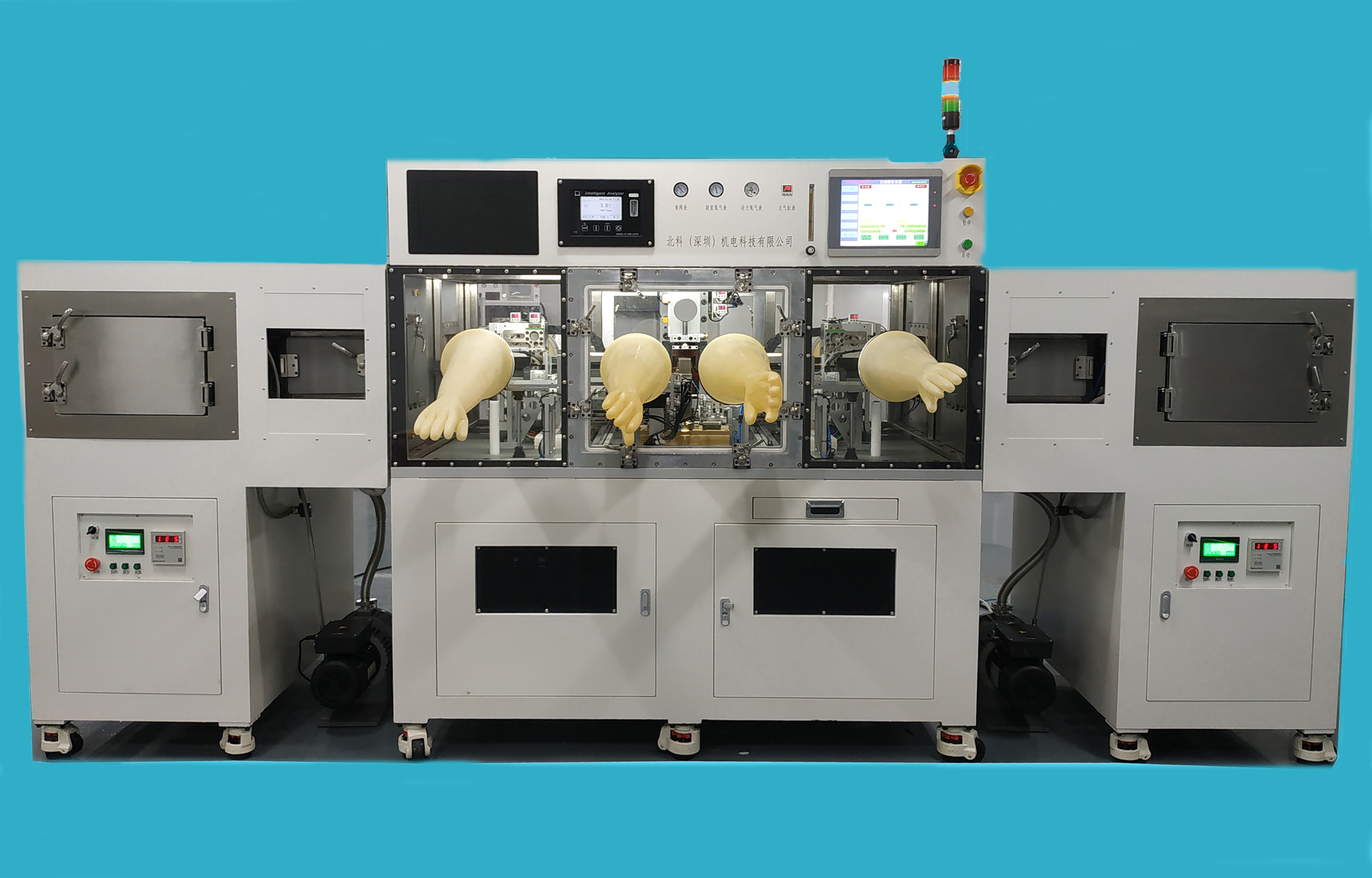
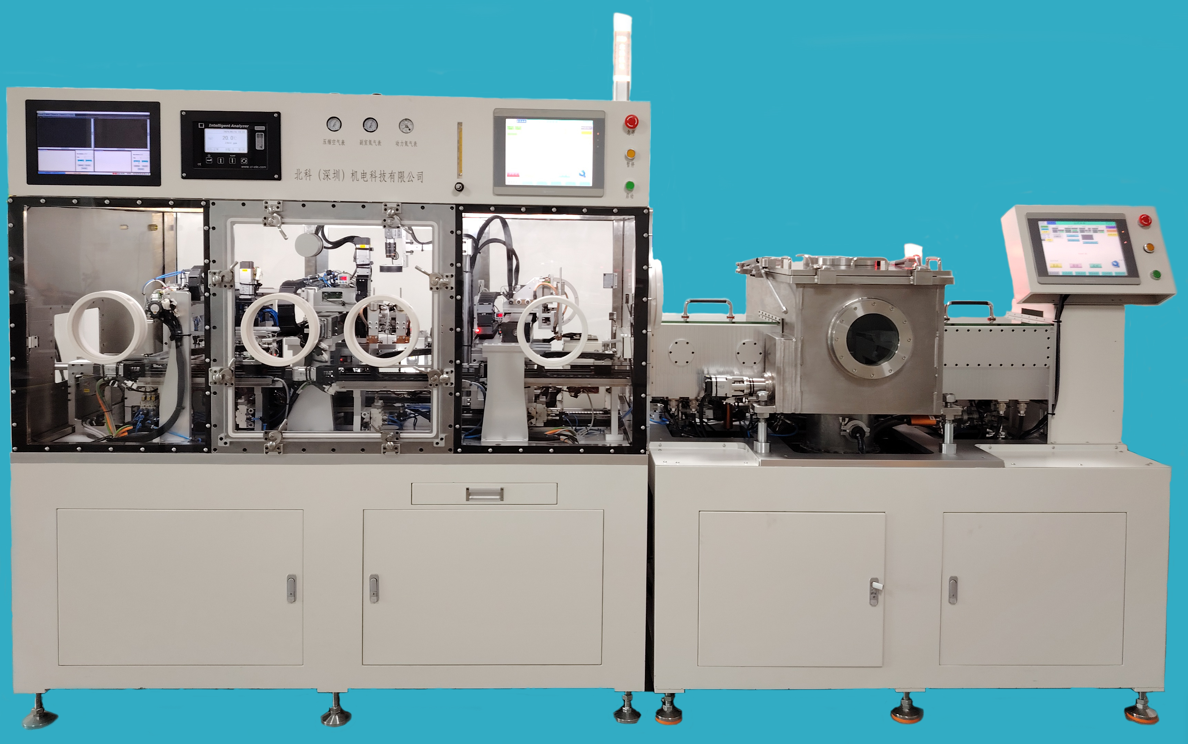
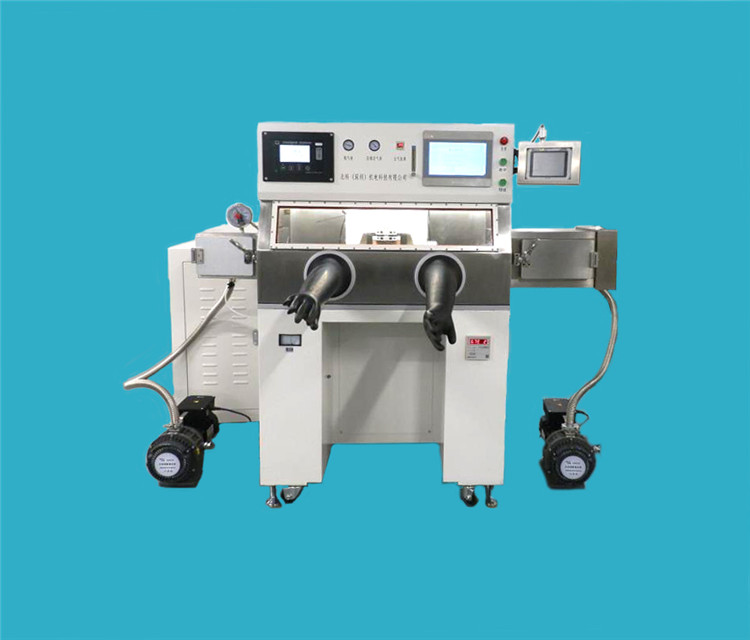
光电器件TO46、TO56、TO39、TO38等高精度封焊设备
订购咨询热线:0755-28997636
15899867682 13321105262
全自动视觉封焊机是一种广泛应用于焊接领域的自动化设备,它的工作原理主要涉及以下几个步骤:
视觉定位:首先,采用相机或其他视觉系统,对需要焊接的工件进行图像采集。通过图像处理算法,识别并定位焊接接头或目标区域的位置和形状。
路径规划:根据视觉定位得到的焊接目标区域的位置信息,结合预先设定的焊接路径和参数,计算出焊头的运动路径和速度。路径规划旨在保证焊接过程中的精度和效率。
动作控制:根据路径规划的结果,在机器人或焊接设备上通过伺服驱动器控制焊头的运动。焊头的运动可以包括直线运动、旋转运动等,以达到焊接的要求。
温度控制:在焊接过程中,控制焊头的温度是关键。通过控制焊接电流、电压和焊接时间等参数,确保焊接区域的温度达到适宜的焊接温度,以实现焊接效果。
焊接过程监控:全自动视觉封焊机通常配备有传感器和监控系统,用于实时监测焊接过程中的参数和状态。通过监测焊接质量、温度、电流等指标,及时调整焊接参数和控制焊接质量。

扫一扫加好友

微信公众号
地址:深圳市龙岗区园山街道大康社区东海科技工业园10号三楼
联系人:李华春
邮箱:15899867682@139.com